Роторно-Лопастной электроГенератор
Пасечный В.П.
Рассматривается устройство преобразования углеводородного топлива в электроэнергию. Показано, что роторно-лопастное устройство внутреннего сжигания топлива хорошо согласуется с электромеханическим преобразователем энергии качания лопастей в электроэнергию, основанном на принципе модуляции магнитной проводимости и широко известном по использованию в Вентильном Индукторном Приводе. Показана реализуемость и эффективность объединения функций синхронизации лопастей и преобразования энергии.
В последнее время можно заметить возросший интерес к работам по созданию роторно-лопастных двигателей [1,3,4,6]. Несмотря на значительные успехи, одной из проблем остаётся разработка синхронизатора лопастей с большим ресурсом и высоким КПД. Существует широкая сфера применения РЛД, гибридный транспорт, резервные и не только источники электропитания, где синхронизатор может быть исключен из устройства. Такой подход известен [1,6] и состоит в том, что к каждой из лопастей подсоединяются электромеханические устройства, управляемые от общего устройства управления. Суть электродинамической синхронизации состоит в том, что на каждую ось лопатки устанавливается электрический Двигатель-Генератор и на два этих ДГ возлагается функция синхронизации роторов и одновременно преобразования механической энергии в электрическую. Поскольку функция синхронизации объединена с функцией получения электроэнергии, то появляется новый тип устройства, который мы назовём Роторно-Лопастной Генератор. Суть, реализуемость и характеристики электродинамического подхода к синхронизации лопастей РЛД в литературе рассмотрены не достаточно и данная статья направлена на то, чтобы восполнить этот недостаток. Схема рассматриваемого устройства приведена на рисунке 1. На схеме РЛД представлен двумя лопастями, вращающимися вокруг общей оси с одновременным качанием относительно друг друга, и сделано это потому, что работа РЛД в рассматриваемом устройстве отличается от хорошо известных [3, 4] только относительным движением лопастей и связанными с этим последствиями.
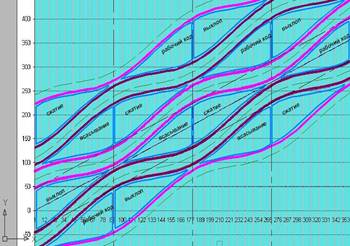 В РЛД
с механическим синхронизатором движение лопастей выполняется по
синусоидальному закону и это демонстрируется диаграммой Кардашева рисунка 2,
взятой из [1].
В РЛД
с механическим синхронизатором движение лопастей выполняется по
синусоидальному закону и это демонстрируется диаграммой Кардашева рисунка 2,
взятой из [1].
Рис. 2. Диаграмма РЛД с механическим синхронизатором.
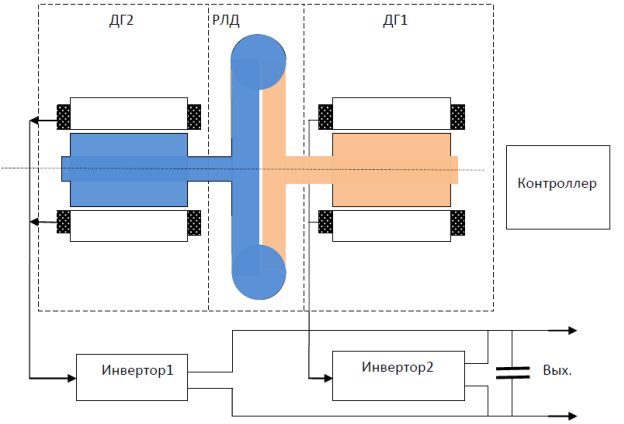
Рис 1. Схема роторно-лопастного генератора с электродинамической синхронизацией.
Каждая из камер образуется задней стенкой лидирующей лопасти и передней стенкой замыкающей. Мгновенная кинетическая мощность, создаваемая Камерой Сгорания:
[1] ![]() где:
где:
![]() момент
силы, действующей на лидирующий и замыкающий поршни;
момент
силы, действующей на лидирующий и замыкающий поршни;
![]() - угловая
скорость и мощность лидирующей лопасти;
- угловая
скорость и мощность лидирующей лопасти;
![]() - угловая
скорость и мощность замыкающей лопасти.
- угловая
скорость и мощность замыкающей лопасти.
Если ![]() и
и ![]() постоянны,
то кинетическая энергия системы остаётся неизменной и M1 за
исключением потерь – мощность, которая генерируется системой. M0 – мощность,
которая возвращается в КС из системы, циркулирует в системе ( передаётся
рабочему телу замыкающей лопастью и отбирается от рабочего тела лидирующей
лопастью). M0 увеличивает
установленную мощность ДГ и снижает КПД системы, так как имеют
место потери на всех этапах преобразований.
постоянны,
то кинетическая энергия системы остаётся неизменной и M1 за
исключением потерь – мощность, которая генерируется системой. M0 – мощность,
которая возвращается в КС из системы, циркулирует в системе ( передаётся
рабочему телу замыкающей лопастью и отбирается от рабочего тела лидирующей
лопастью). M0 увеличивает
установленную мощность ДГ и снижает КПД системы, так как имеют
место потери на всех этапах преобразований.
Рассматриваемая схема РЛД позволяет реализовать различные графики движения лопастей, в том числе синусоидальные, как в РЛД с механическим синхронизатором, но мы ограничимся кусочно линейным (кусочно равномерным), который превосходит синусоидальный по некоторым параметрам и легче может быть реализован.
Модифицированная диаграмма Кардашёва для РЛГ с кусочно равномерным движением лопастей представлена на рисунке 3.
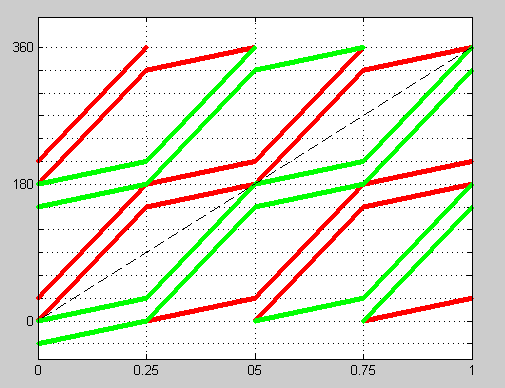 Рис. 3. Диаграмма РЛГ.
Рис. 3. Диаграмма РЛГ.
Модификация вызвана тем, что РЛГ не имеет выходного вала и поэтому по горизонтальной оси отложено время, нормированное к периоду происходящих процессов. За нулевое положение роторов принято положение свечи зажигания.
На рисунке границы одной лопасти показаны красным, а другой зелёным цветом. Движение каждой лопасти состоит из чередующихся участков (фаз) равной длительности, но разной скорости. В фазе медленной скорости лопасть движется со скоростью V0, а в фазе быстрой скорости - со скоростью V1. На границе двух фаз имеется переходная область, в которой быстрая лопасть передаёт свою кинетическую энергию медленной области, взаимодействуя с ней через КС. В переходной области оба ДГ отключены, т.е. не выполняют никаких функций кроме контрольных.
В конце быстрой фазы происходит зажигание в КС и возрастающее давление начинает тормозить быструю лопасть и ускорять медленную. Оба процесса находятся под контролем контроллера. Когда ускоряющаяся лопасть достигает скорости V1, контроллер фиксирует у лопасти режим быстрой фазы, связанный с ней ДГ включается в генераторный режим и преобразует энергию расширяющегося газа в электрическую, одновременно стабилизирует V1, сдерживает лопасть, не позволяя газам разогнать её. Когда замедляющаяся лопасть достигает скорости V0, фиксируется режим медленной фазы, связанный с лопастью ДГ включается в двигательный режим, стабилизирует неизменность дальнейшей скорости.
Такой подход обеспечивает минимальное значение переходной зоны, гарантируя одновременно безударность и плавность обмена кинетическими моментами между лопастями. При этом на процесс обмена не затрачивается электроэнергии. Электроэнергия тратится только на поддержание скорости медленной фазы.
Из [1] можно найти мощность ДГ в двигательном режиме:
[2] M0 = M(t)* V0/ (V1-V0);
Лопасть проходит со скоростью V0 угол равный её ширине αL, а со скоростью V1 за то же время 180-αL.
[3] M0 = M(t)* αL / (180-2*αL);
Для ширины лопасти 30 градусов M0 = 25% M(t);
Для ширины лопасти 20 градусов M0 = 14% M(t);
Уменьшение ширины лопасти повышает эффективность системы, но при этом ухудшаются прочностные характеристики и для нахождения оптимума по αL необходимо выполнять детальное мультифизическое моделирование системы.
Двигатель-генератор.
Двигатель- генератор должен дважды за оборот переключаться из генераторного режима в двигательный и наоборот. Несмотря на такой режим, обеспечивать высокий КПД (более 0.9) и управляемость по положению, работать при больших оборотах и перекрывать широкий диапазон мощностей, так, чтобы не ограничивать возможности роторно лопастных двигателей.
Электрические машины, удовлетворяющие этому сложному набору требований, существуют – это Вентильно Индукторные Машины, известные за рубежом как Switched Reluctance Drive [2,5,13,14]. Внешний вид индукторной машины разработанной ООО «САПФИР» г. Ростов на Дону представлен на рисунке 4, а типовое сечение на рис. 5 [12]. ВИМ способен работать при жёстких условиях по нагрузке, так как его ротор это шихтованный сердечник из электротехнической стали без обмоток. Из всех известных машин ВИМ имеет минимальную стоимость при равной мощности и другие достоинства, прекрасно сформулированные в [12].
 рис . 4
Вентильно-индукторный привод.
рис . 4
Вентильно-индукторный привод.
ВИМ пока не разработаны для всего спектра их возможного применения, хотя работы в этом направлении интенсивно проводятся, и в России тоже[4,8,12]. Использование ВИМ в РЛГ имеет ряд особенностей по сравнению с ВИМ общего назначения, на которых имеет смысл остановиться подробнее.
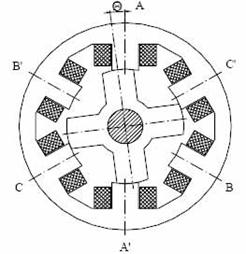
Рис 5. Сечение вентильно-индукторной машины.
i… При уже определённом количестве зубцов статора и ротора вся зона углов поворота ротора от нуля до 360 градусов оказывается разбитой на равные угловые зоны, размер которых зависит от числа зубцов на статоре и роторе:
[ 4 ] Ѳ = 360/Zr – 360/Zs; где:
Zr, Zs – число зубцов ротора и статора.
Число зон на оборот равно 360/ Ѳ = Zs*Zr/(Zs-Zr); [5]
Каждая зона может быть и двигательной и генераторной. Но, начало каждой зоны в двигательном режиме совпадает с концом этой же зоны в генераторном режиме и наоборот. Если ротор движется в двигательном режиме, то в конце зоны он попадает в начало очередной генераторной зоны, происходит естественный переход из двигательного режима в генераторный, ток двигательного режима начинает выполнять роль тока возбуждения генераторного режима. Чтобы реализовать двигательный(или генераторный) режим в пределах нескольких зон подряд, необходимо в конце каждой зоны погасить ток фазы, связанной с этой зоной, и возбудить ток в фазе, связанной с очередной зоной.
При переходе из генераторного режима в двигательный с сохранением направления движения необходимо менять фазу, для чего необходимо погасить ток возбуждения и задать в другой фазе двигательный ток. Из сказанного следует, что реализация кусочно линейного алгоритма отличается от равномерного генераторного режима тем, что содержит на каждый оборот на две смены фаз меньше, рассматриваемый алгоритм проще генераторного (и двигательного) и может быть реализован при тех же условиях что и обычный генераторный (двигательный).
ii… За период РЛГ происходит четыре рабочих такта, которые отличаются только сменой лопастей. Более подробно достаточно рассмотреть только один такт, например, интервал нормированного времени от нуля до 0.25. Схема, на которой показаны используемые в дальнейшем обозначения, представлена на рисунке 6, а зависимости давлений от времени на рисунке 7.
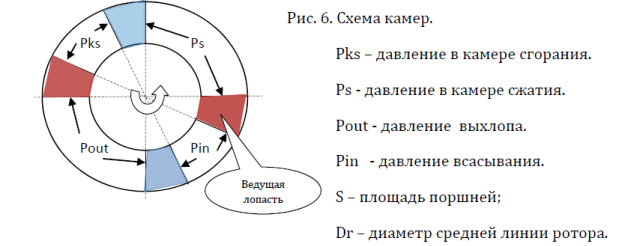
Энергия ведущей лопасти создаётся за счёт давления в камере сгорания и часть её тут же без преобразований расходуется на собственные нужды, создавая давления выхлопа, всасывания и сжатия. Момент расходов на собственные нужды:
[6] Md = S * Dr/2 * (Ps + Pout - Pin).
Md уменьшает момент, передаваемый от ведущей лопасти генератору и увеличивает момент, передаваемый от двигателя замыкающей лопасти. Если не учитывать механические потери, то моменты двигателя и генератора одинаковы.
Рассмотрим влияние момента трения (Mt ), который отражает механические потери в системе создаваемые уплотнениями и подшипниками. Mt уменьшает момент передаваемый генератору, а также увеличивает момент, который должен развивать двигатель.
Если считать, что ВИМ работают в режиме близком к линейному, то их токи пропорциональны моментам на валу. В системе, где отсутствуют механические потери при передаче энергии от лопастей к ДГ, в силу сказанного должны быть равны токи двигателя и генератора. Если токи не равны, то разность токов может быть использована для оценки механических потерь в системе.
Рассматриваемая кинематическая схема, не содержащая кинематических передач, должна иметь маленькие потери, не превышающие единиц процентов при номинальном режиме. Поэтому токи и тепловые мощности, рассеиваемые в двигательном и генераторном режимах, будут примерно одинаковыми; в двигательном режиме на единицы процентов больше.
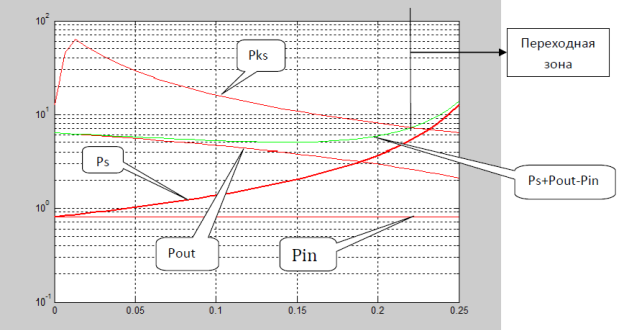
Рис. 7 Зависимости давлений в рабочем цикле от времени. Коэффициент сжатия принят равным 10. Сжигание смеси увеличивает давление в 5 раз. Коэффициент политропы 1.2.
Количество зон, используемых в генераторном режиме, достаточно велико, поэтому тепловая мощность будет равномерно распределяться между фазами. В двигательном режиме тепловую мощность также необходимо равномерно распределить между фазами, иначе габаритная мощность ДГ существенно уменьшится. Для этого необходимо, чтобы число зубцов ротора и статора, удовлетворяло условию:
[7 ] Ѳ * Nf = (360/Zr – 360/Zs )* Nf >= αL; где:
Nf – число фаз двигатель/генератора.
То есть, в угловом расстоянии, проходимом лопастью в медленной фазе, должно укладываться число зон равное числу фаз. Выполнение этого требования приводит к тому, что ДГ становится высокомоментным и хорошо согласуется по нагрузкам с РЛД.
Ток ДГ будет соответствовать графику Pks на рисунке 7. Эффективность ВИМ возрастает или, по крайней мере, не уменьшается при перегрузках [ 10 ]. Это свойство ВИМ очень ценно для преобразования взрывной энергии газов ДВС.
iii… Массо – габаритные характеристики РЛГ. Как считают Кузнецов В.А., Кузьмичёв В.А. [10], массо-габаритные характеристики ВИМ равной мощности могут изменяться на порядок в зависимости от условий применения, стоимости и других особенностей. Сравним мощности ВИМ в обычном режиме и при использовании его в РЛГ.
Мощность ВИМ в двигательном режиме 30кВт.
Мощность 2-х ВИМ в составе РЛГ 45кВт.
Циркулирующая мощность РЛГ 9кВт.
Выходная мощность РЛГ 36кВт.
Послесловие: Допущение о кусочно-линейном движении лопастей позволило, используя достаточно простые, и в то же время корректные, выражения, рассмотреть происходящие в РЛГ процессы. Стало ясно, что линейное движение лопастей не является оптимальным, а является лишь средством поддержания работоспособности. Ценным в рассматриваемой схеме является то, что график движения лопастей в двух фазах может поддерживаться независимо друг от друга и решать разные задачи.
График движения в медленной фазе должен минимизировать среднюю мощность M0 = ∫Pks(t)*V0(t) dt при условии, что задачи газораспределения и смены рабочих фаз РЛД не нарушаются. Это может в несколько раз уменьшить циркулирующую мощность и увеличить за счёт этого выходную мощность.
График движения в быстрой фазе может, например, минимизировать максимальную мощность в течение такта, если она ограничивает максимальную среднюю мощность.
Это может быть достигнуто за счёт того, что система позволяет разогнать лопасть в начале такта до скорости больше V1, а в остальной части такта преобразовать энергию лопасти в электроэнергию с сохранением средней скорости за такт на уровне V1.
<meta
http-equiv="Content-Type" content="text/html; charset
=windows-1251" />
<meta name="keywords"
content="Роторно-лопастной, электрогенератор, электро-генератор,
устройство преобразования углеводородного топлива, РЛГ, роторно, лопастной,
электро, генератор, двигатель, инновации " />
<meta name="description" content="Роторно-лопастной электро
генератор" />
Литература:
1. http://www.reaa.ru/cgi-bin/yabb/YaBB.pl?num=1288970207/404 - сайт Ассоциации Экспериментальной Авиации.
2. «Рынок Электротехники», № 2, 2007 г. Вентильно-индукторный электропривод: современное состояние и перспективы развития. Михаил Бычков, профессор, доктор технических наук, кафедра автоматизированного электропривода МЭИ.
3. http://ekoteh.narod.ru/rbe_new/rotor_valve/page05.html - Роторно-лопастная машина
4. РОТОРНО-ЛОПАСТНОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ (ВАРИАНТЫ), МЕХАНИЗМ КАЧАНИЯ ЛОПАСТЕЙ, УЗЕЛ УПЛОТНИТЕЛЬНЫХ ЭЛЕМЕНТОВ ЛОПАСТЕЙ И ПОДШИПНИКОВАЯ ОПОРА МЕХАНИЗМА КАЧАНИЯ ЛОПАСТЕЙ патент № 2159342.
5. Николаев В.В. Рыбников В.А. Разработка интегрированного стартер-генератора на основе вентильно-индукторной машины
6. http://roboforum.ru/forum35/topic11069.html - Роторно-лопастной двигатель с электронным синхронизатором.
7. http://www.popmech.ru/blogs/post/3631-rossiyskiy-rotorno-lopastnoy/- популярная механика.
8. Электроприводы вентильные индукторные (ВИП),г. Ростов-на-Дону, (863) 257-83-32, www.ooo-sapfir.ru
9. В.И.
Ткачук, МАТЕМАТИЧЕСКАЯ
МОДЕЛЬ ВЕНТИЛЬНОГО РЕАКТИВНОГО
ДВИГАТЕЛЯ. УДК 621.455 "Электромашиностроение
и электрооборудование"
Республиканский межведомственный научно-технический сборник №50 1998
http://www.library.ospu.odessa.ua/online/periodic/ee_50/77.arj
10. В.А. Кузнецов, В.А. Кузмичёв. Вентильно- индукторные двигатели. Изд. МЭИ 2003г.
11. И.Н. Радимов, В.В. Рымша, З.П. Процына. Коэффициенты полюсного перекрытия трёхфазного вентильно- реактивного двигателя. 2009г.
12. Продукция ООО «САПФИР» файл http://www.ooo-sapfir.ru/products.html#sec2. Основные достоинства вентильных индукторных двигателей, генераторов (ВИД/ВИГ).
13. http://ru.wikipedia.org/wiki/Вентильный_реактивный_электродвигатель.
14. http://kaskod.ru/produkt/motorsrm/srm_article01/ - Вентильные реактивные электродвигатели \ генераторы (Switched Reluctance Motor \ Generators).